
Bingyao Huang, Ying Tang, Samed Ozdemir, and Haibin Ling
[IEEE T-ASE 2020 paper] [ISMAR-Adjunct 2018 paper] [GitHub]
Abstract
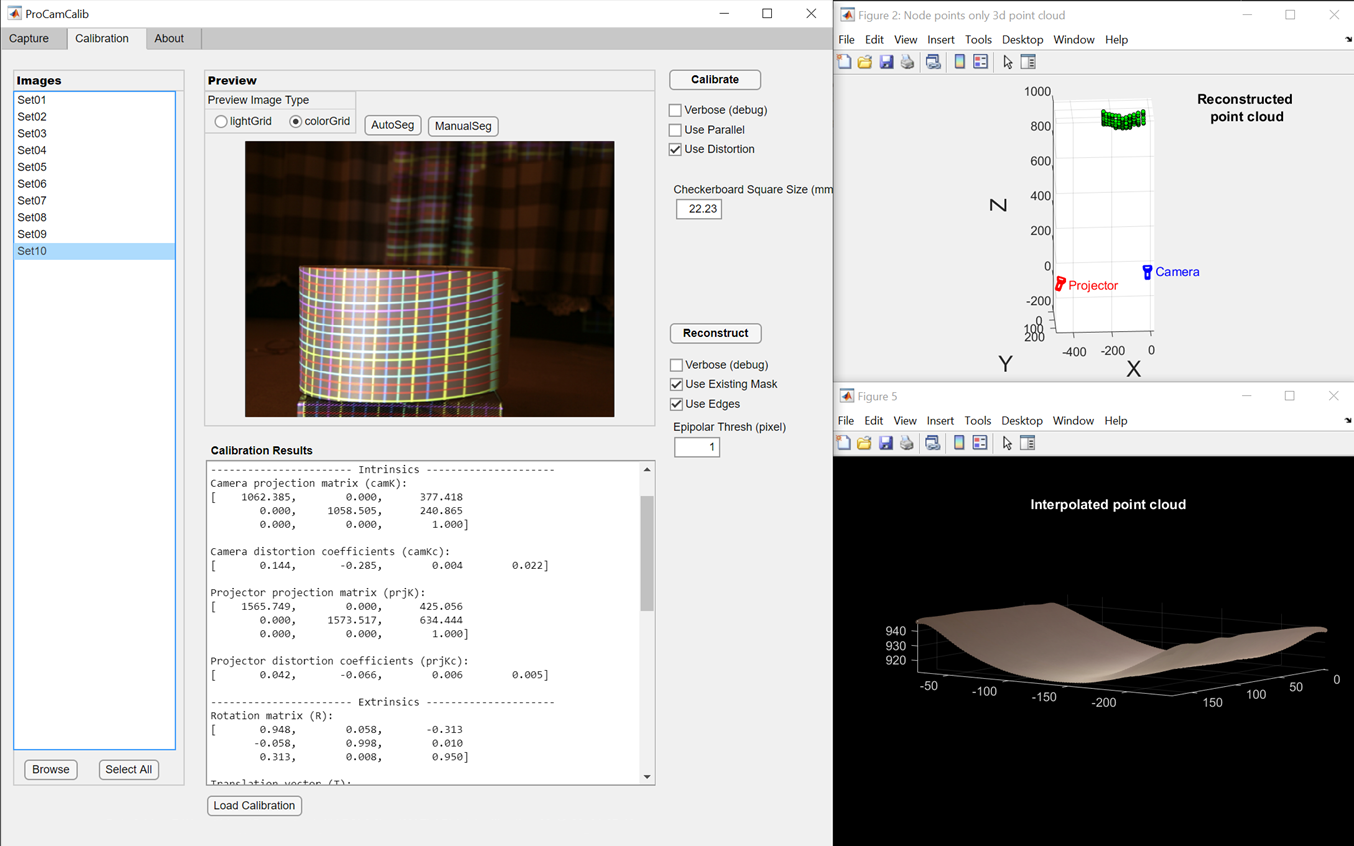
Existing projector-camera calibration methods typically warp keypoints from a camera image to a projector image using estimated homographies, and often suffer from errors in camera parameters and noises due to imperfect planarity of the calibration target. This paper proposes a practical and robust projector-camera calibration system that explicitly deals with these challenges. Firstly, a graph-theory-based correspondence algorithm is built on top of a color-coded spatial structured light (SL) pattern. Such SL correspondences are then used for a coarse projector-camera calibration. To gain more robustness against noises from an imperfect planar calibration board, we develop a bundle adjustment algorithm to jointly optimize the estimated projector-camera parameters and the correspondences’ coordinates. Moreover, our system requires only one shot of SL pattern for each calibration board pose, which is much more practical than multi-shot solutions. Comprehensive experimental validation is conducted on both synthetic and real datasets and our method clearly outperforms existing methods in all experiments. For the benefit of the society, a practical open source software with graphical user interface (GUI) of the developed system is publicly available at [GitHub].
Single-shot-per-pose
Software video user guide
Related Work
- Bingyao Huang and Haibin Ling. End-to-end Projector Photometric Compensation. CVPR. 2019. [Paper] [Supp. material] [GitHub] [Webpage]
- Bingyao Huang and Haibin Ling. CompenNet++: End-to-end Full Projector Compensation. ICCV. 2019. [Paper] [Supp. material] [GitHub] [Webpage]
- Daniel Moreno and Gabriel Taubin. Simple, accurate, and robust projector-camera calibration. 3DIMPVT. 2012. [Paper] [Webpage]